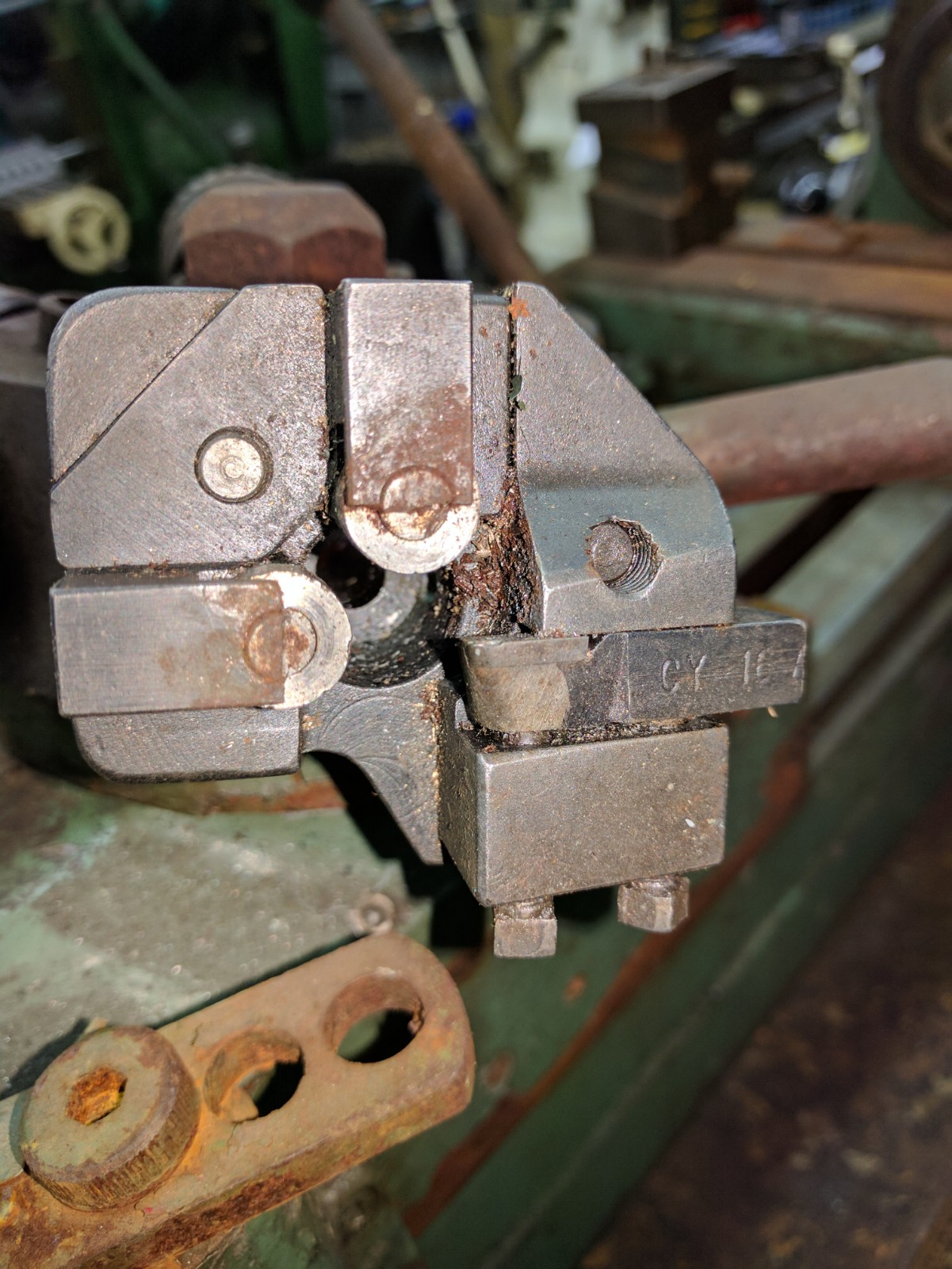
Started off with 3 seized up drill chucks. PB Blaster and some persuasion freed them up. Spinning them in the lathe with some Scotch Brite pads made the look great.


Started off with 3 seized up drill chucks. PB Blaster and some persuasion freed them up. Spinning them in the lathe with some Scotch Brite pads made the look great.
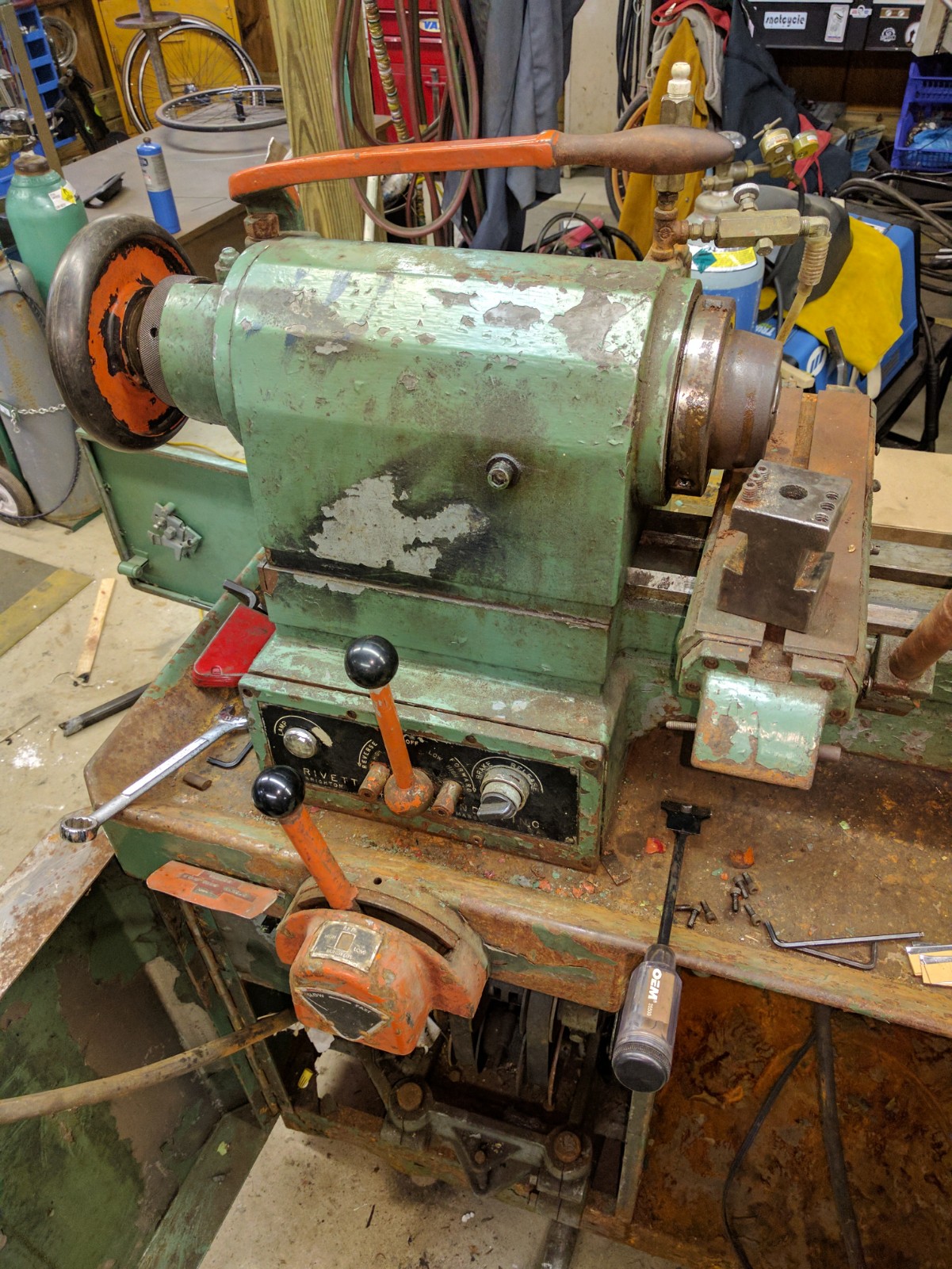
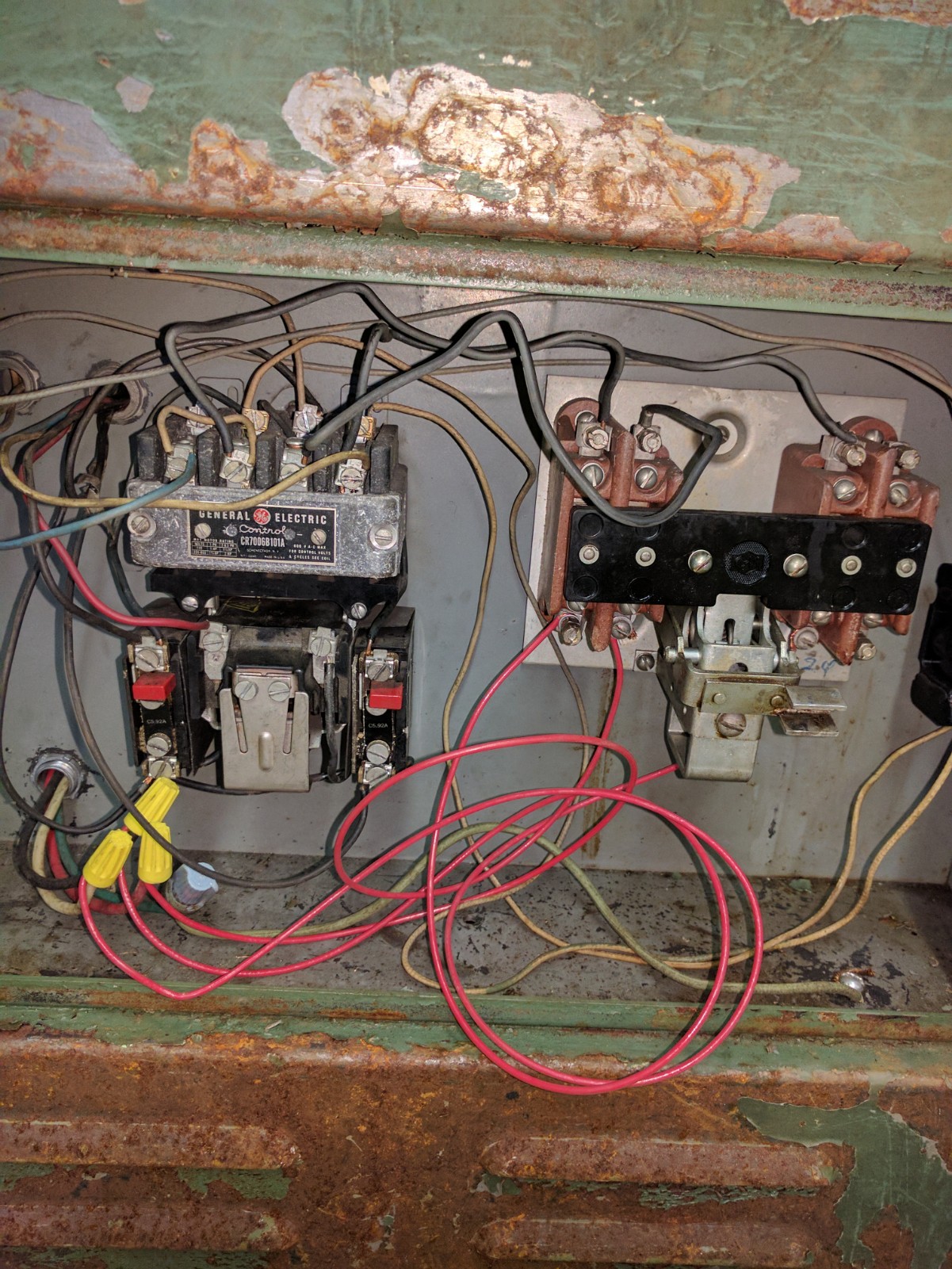
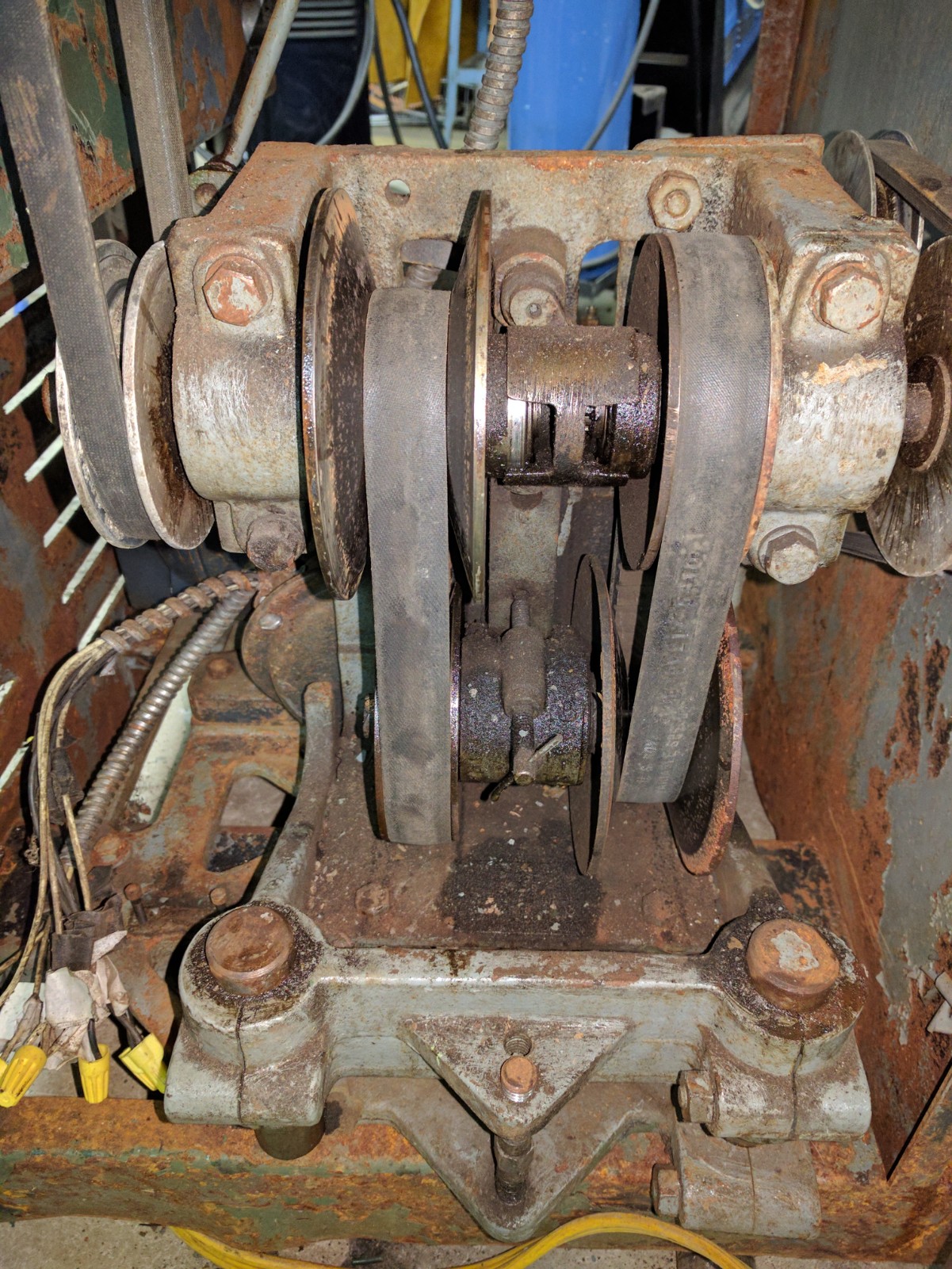
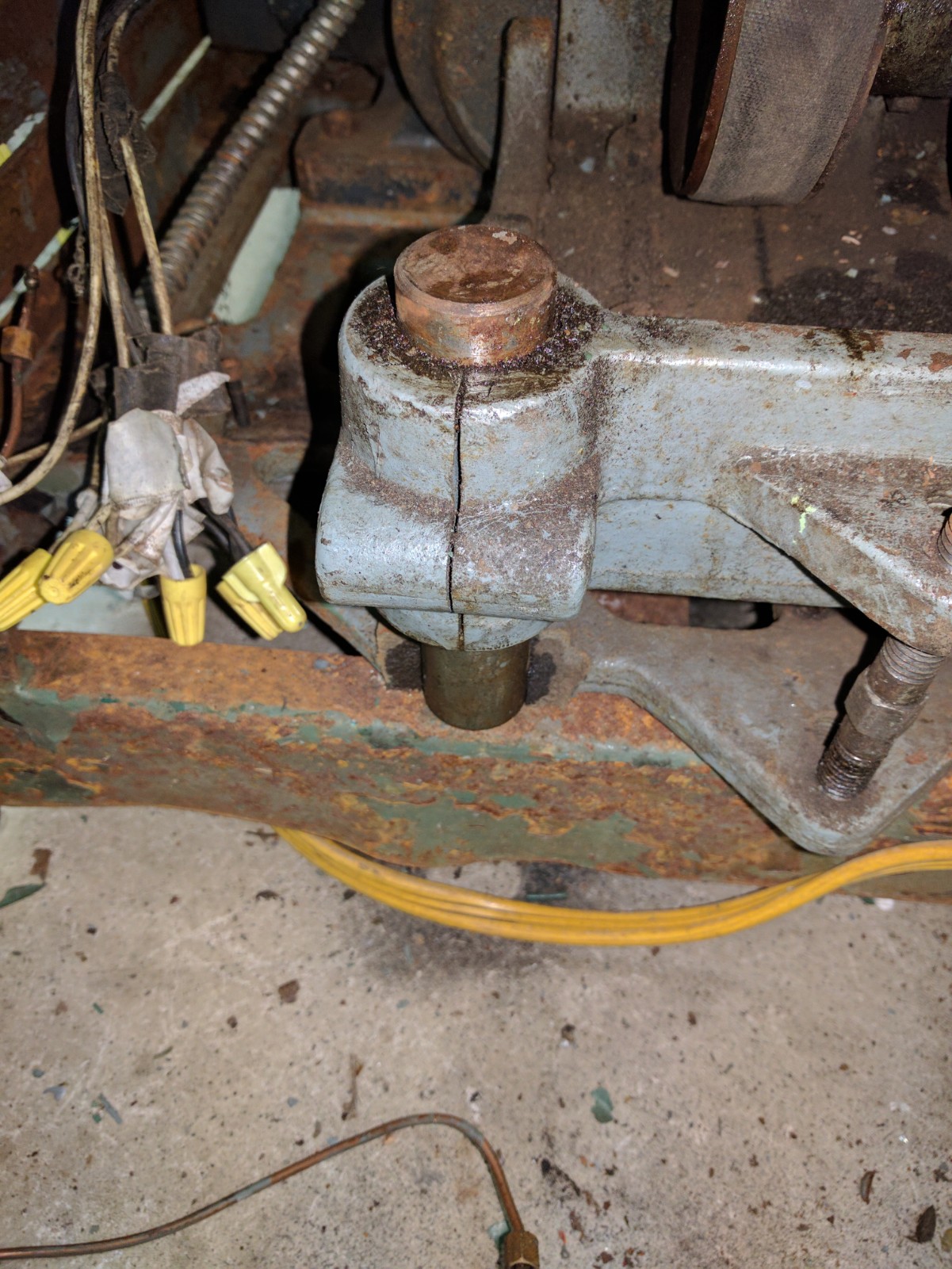
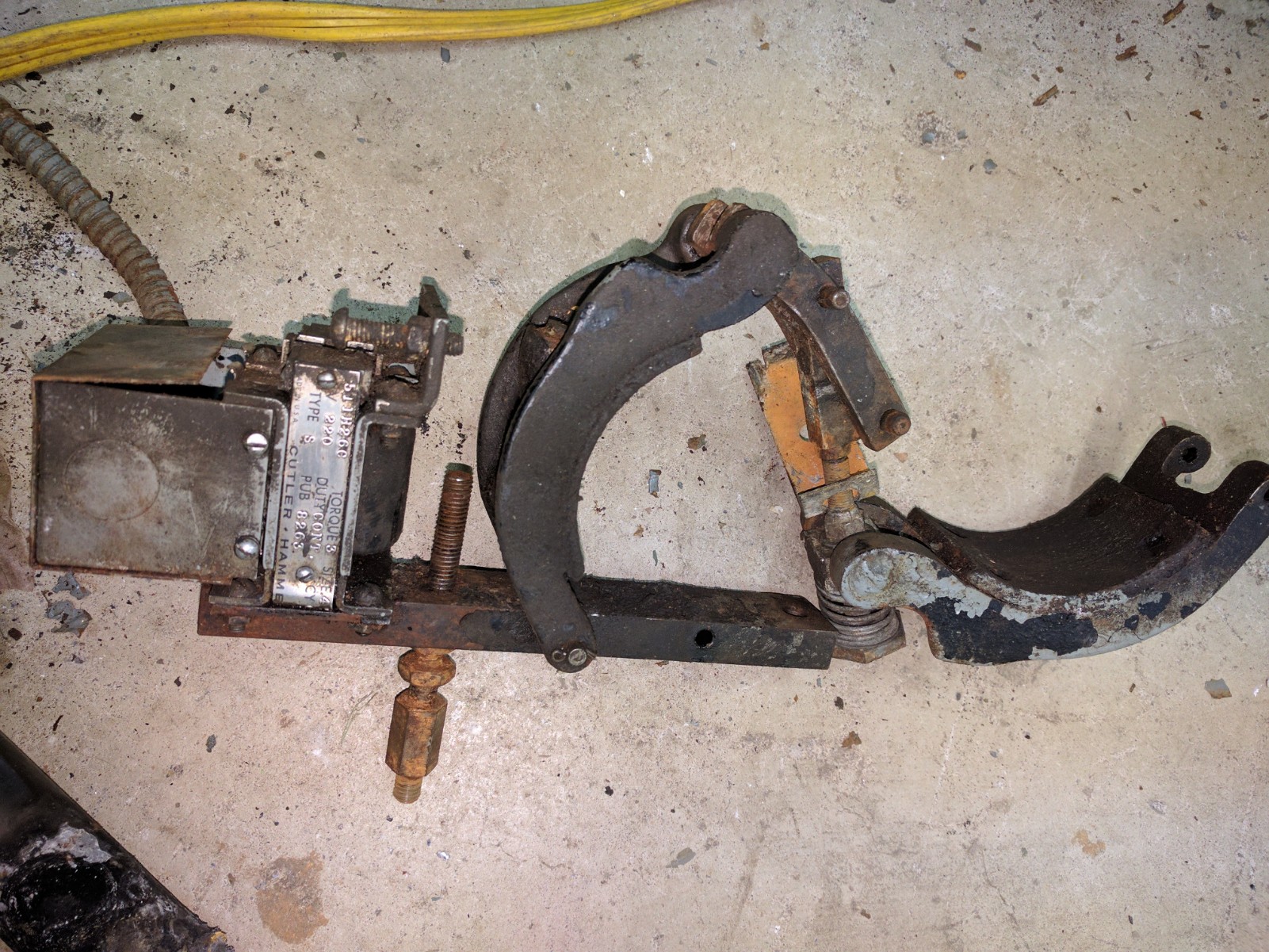
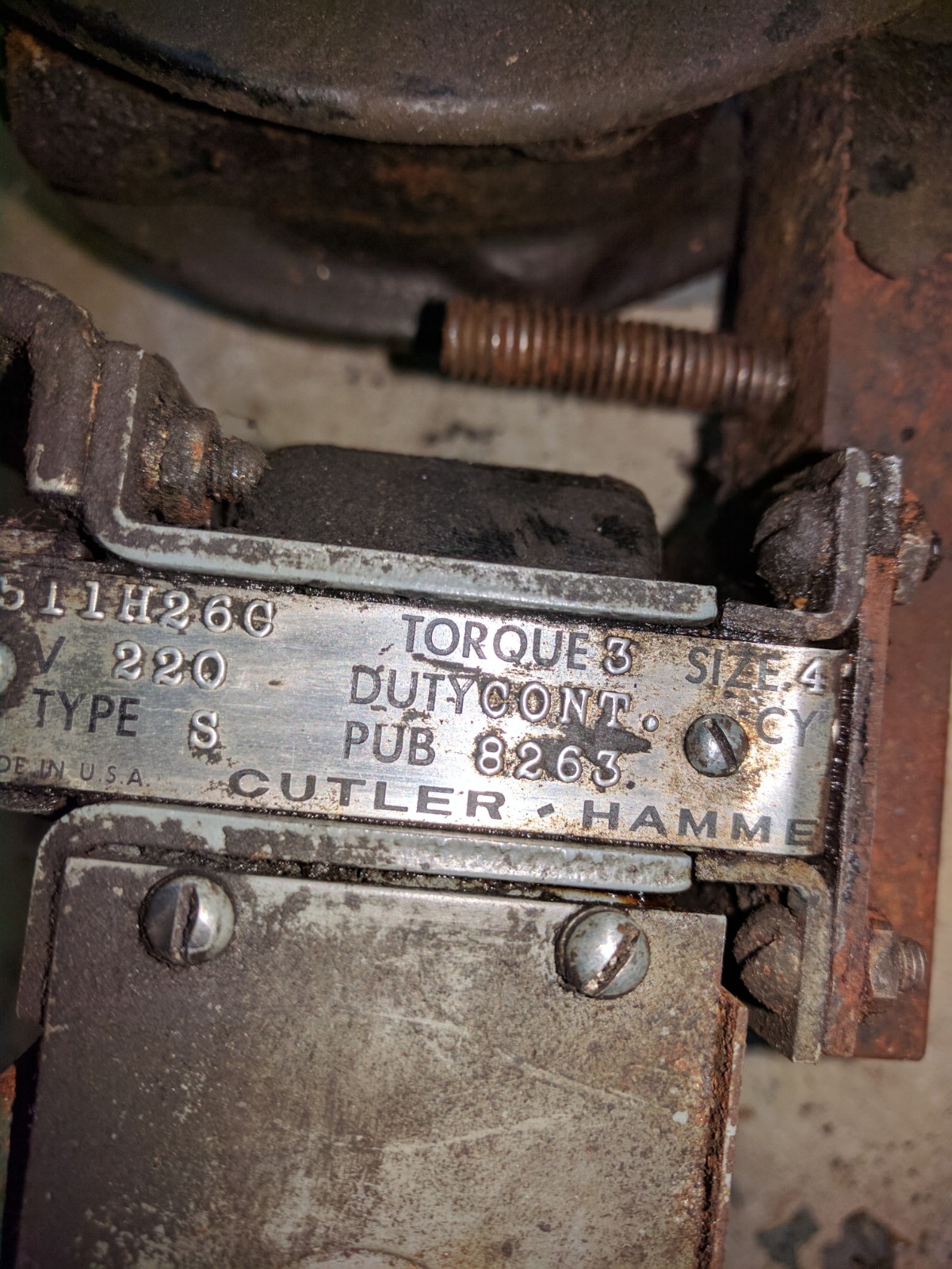
Removed non functioning Cutler Hammer Type S size 4 from the Rivett 918. Also noticed that the Variable Speed Drive has a broken "foot" and the bottom left Pulley is wonky. Can feel the vibration so I will investigate solutions.

Yesterday I posted how the WiPy 2.0 and Atom had trouble connecting over IP address and that USB worked great. Well no more. Today for no apparent reason the connection is wonky. Code runs, shows in console, exits and goes to REPL prompt. >> Can't type in console at that point, reconnect does note reconnect, reset device, code reruns as console show output. Can't sync, won't connect......blah 1 hour wasted.
PyCom says they have PyMakr plugin for other editors, cool. Loaded up Sublime, no PyMakr to be found in package list (assuming that's where it would be but just guessing because PyCom docs are less than accurate.
Next up PyCharm ...wait not ready yet according to recent forum post...
I have a brick!
OK, looks like for whatever reason repl>> command line is busted. Does not work in Atom and or in screen /dev/cu.ser.... mode.
I will have a look some more tomorrow but as far as I can tell - PyCom is not ready for prime time.
read more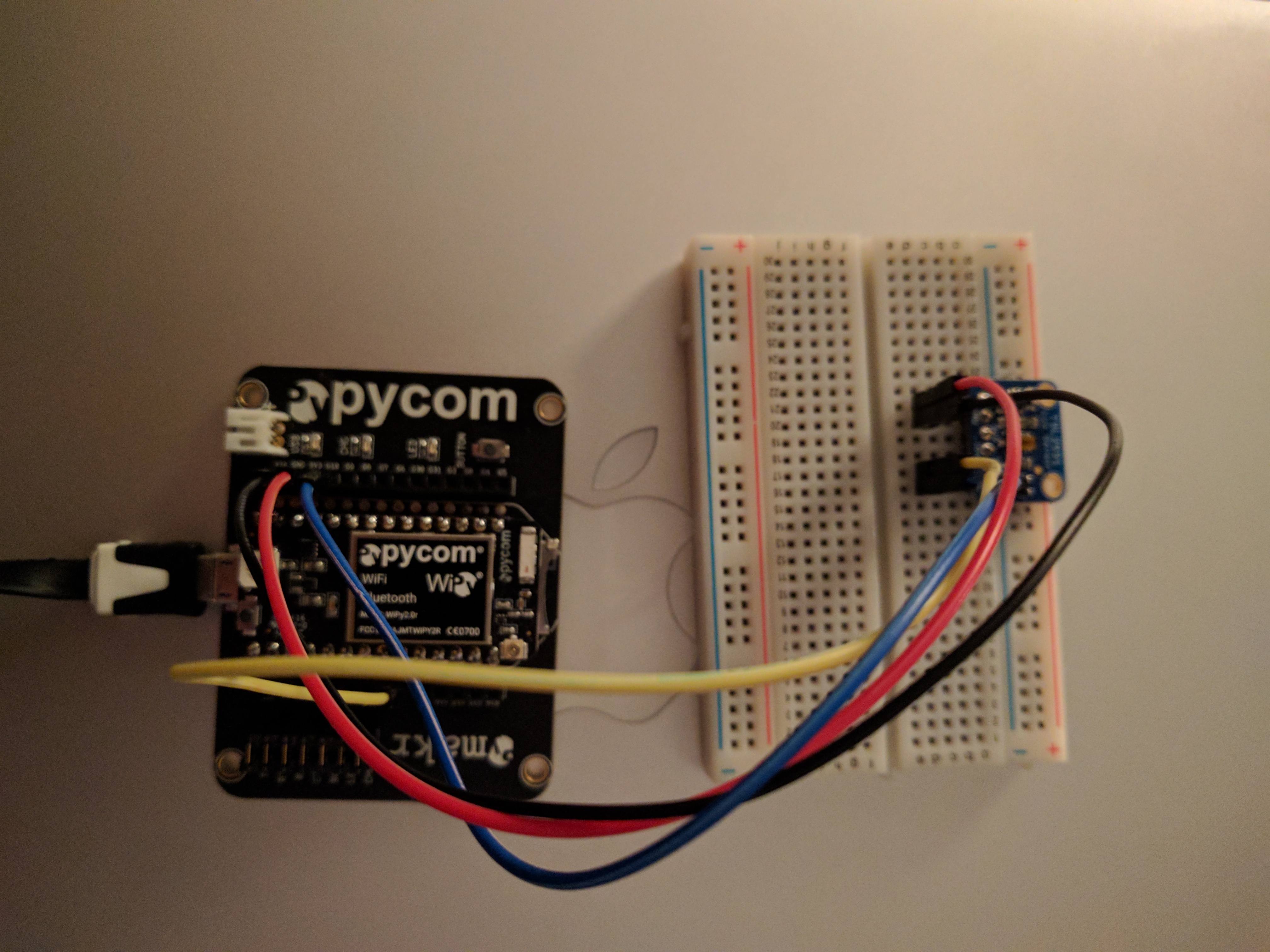
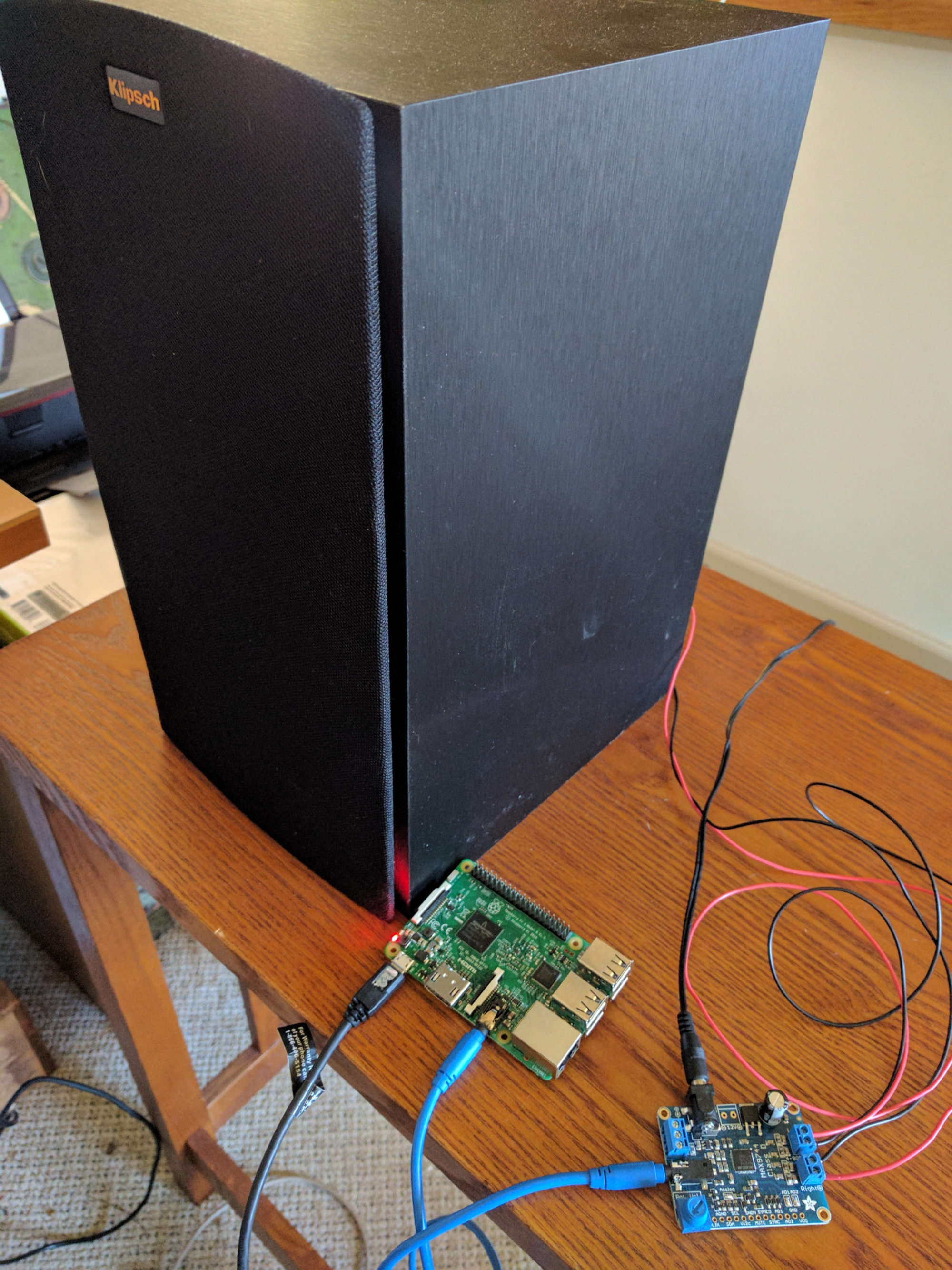
Getting acclimated to the WiPy 2.0 and Expansion Board. My first "hello world" if you will is to get a TSL2591 Light Sensor running. It is an i2c device.
Initial Notes on WiPy 2.0 Setup:
TSL2991 Code:
Stole this from https://github.com/maxlklaxl/python-tsl2591
Out of the box this code did not work with the WiPy 2.0. After debugging a bit it turns out the pin outs for SDA and SCL needed to be changed.
Code Snippet (line 52ish of tsl2951.py that I changed to work with WiPy 2.0
[sourcecode language="python" wraplines="false" collapse="false"]
from machine import I2C, Pin
class SMBusEmulator:
__slots__ = ('i2c',)
def __init__(self):
self.i2c = I2C(pins=("P8", "P23")) #SDA SCL respectively
[/sourcecode]
Full Code:
[sourcecode language="python" wraplines="false" collapse="false"]
# tsl2591 lux sensor interface
import time
VISIBLE = 2
INFRARED = 1
FULLSPECTRUM = 0
ADDR = 0x29
READBIT = 0x01
COMMAND_BIT = 0xA0
CLEAR_BIT = 0x40
WORD_BIT = 0x20
BLOCK_BIT = 0x10
ENABLE_POWERON = 0x01
ENABLE_POWEROFF = 0x00
ENABLE_AEN = 0x02
ENABLE_AIEN = 0x10
CONTROL_RESET = 0x80
LUX_DF = 408.0
LUX_COEFB = 1.64
LUX_COEFC = 0.59
LUX_COEFD = 0.86
REGISTER_ENABLE = 0x00
REGISTER_CONTROL = 0x01
REGISTER_THRESHHOLDL_LOW = 0x02
REGISTER_THRESHHOLDL_HIGH = 0x03
REGISTER_THRESHHOLDH_LOW = 0x04
REGISTER_THRESHHOLDH_HIGH = 0x05
REGISTER_INTERRUPT = 0x06
REGISTER_CRC = 0x08
REGISTER_ID = 0x0A
REGISTER_CHAN0_LOW = 0x14
REGISTER_CHAN0_HIGH = 0x15
REGISTER_CHAN1_LOW = 0x16
REGISTER_CHAN1_HIGH = 0x17
INTEGRATIONTIME_100MS = 0x00
INTEGRATIONTIME_200MS = 0x01
INTEGRATIONTIME_300MS = 0x02
INTEGRATIONTIME_400MS = 0x03
INTEGRATIONTIME_500MS = 0x04
INTEGRATIONTIME_600MS = 0x05
GAIN_LOW = 0x00
GAIN_MED = 0x10
GAIN_HIGH = 0x20
GAIN_MAX = 0x30
def _bytes_to_int(data):
return data[0] + (data[1]\<\<8)
from machine import I2C, Pin
class SMBusEmulator:
__slots__ = ('i2c',)
def __init__(self):
self.i2c = I2C(pins=("P8", "P23"))
def write_byte_data(self, addr, cmd, val):
buf = bytes([cmd, val])
self.i2c.writeto(addr, buf)
def read_word_data(self, addr, cmd):
assert cmd \< 256
buf = bytes([cmd])
self.i2c.writeto(addr, buf)
data = self.i2c.readfrom(addr, 4)
return _bytes_to_int(data)
SENSOR_ADDRESS=0x29
class Tsl2591:
def __init__(
self,
sensor_id,
integration=INTEGRATIONTIME_100MS,
gain=GAIN_LOW
):
print(sensor_id)
self.sensor_id = sensor_id
self.bus = SMBusEmulator()
self.integration_time = integration
self.gain = gain
self.set_timing(self.integration_time)
self.set_gain(self.gain)
self.disable()
def set_timing(self, integration):
self.enable()
self.integration_time = integration
self.bus.write_byte_data(
SENSOR_ADDRESS,
COMMAND_BIT | REGISTER_CONTROL,
self.integration_time | self.gain
)
self.disable()
def set_gain(self, gain):
self.enable()
self.gain = gain
self.bus.write_byte_data(
SENSOR_ADDRESS,
COMMAND_BIT | REGISTER_CONTROL,
self.integration_time | self.gain
)
self.disable()
def calculate_lux(self, full, ir):
if (full == 0xFFFF) | (ir == 0xFFFF):
return 0
case_integ = {
INTEGRATIONTIME_100MS: 100.,
INTEGRATIONTIME_200MS: 200.,
INTEGRATIONTIME_300MS: 300.,
INTEGRATIONTIME_400MS: 400.,
INTEGRATIONTIME_500MS: 500.,
INTEGRATIONTIME_600MS: 600.,
}
if self.integration_time in case_integ.keys():
atime = case_integ[self.integration_time]
else:
atime = 100.
case_gain = {
GAIN_LOW: 1.,
GAIN_MED: 25.,
GAIN_HIGH: 428.,
GAIN_MAX: 9876.,
}
if self.gain in case_gain.keys():
again = case_gain[self.gain]
else:
again = 1.
cpl = (atime * again) / LUX_DF
lux1 = (full - (LUX_COEFB * ir)) / cpl
lux2 = ((LUX_COEFC * full) - (LUX_COEFD * ir)) / cpl
return max([lux1, lux2])
def enable(self):
self.bus.write_byte_data(
SENSOR_ADDRESS,
COMMAND_BIT | REGISTER_ENABLE,
ENABLE_POWERON | ENABLE_AEN | ENABLE_AIEN
)
def disable(self):
self.bus.write_byte_data(
SENSOR_ADDRESS,
COMMAND_BIT | REGISTER_ENABLE,
ENABLE_POWEROFF
)
def get_full_luminosity(self):
self.enable()
time.sleep(0.120*self.integration_time+1)
full = self.bus.read_word_data(
SENSOR_ADDRESS, COMMAND_BIT | REGISTER_CHAN0_LOW
)
ir = self.bus.read_word_data(
SENSOR_ADDRESS, COMMAND_BIT | REGISTER_CHAN1_LOW
)
self.disable()
return full, ir
def get_luminosity(self, channel):
full, ir = self.get_full_luminosity()
if channel == FULLSPECTRUM:
return full
elif channel == INFRARED:
return ir
elif channel == VISIBLE:
return full - ir
else:
return 0
def sample(self):
full, ir = self.get_full_luminosity()
return self.calculate_lux(full, ir)
[/sourcecode]
Simple main.py to print out 10 sensor readings. Hello World Complete!
Will work on posting to the cloud/thingspeak or something of that nature next
[sourcecode language="python" wraplines="false" collapse="false"]
# main.py -- put your code here!
import time
from machine import Pin
from machine import I2C
import tsl2591
tsl = tsl2591.Tsl2591(0) # initialize tls2591
cnt = 0
while cnt != 10:
time.sleep(2)
full, ir = tsl.get_full_luminosity() # read raw values (full spectrum and ir spectrum)
lux = tsl.calculate_lux(full, ir) # convert raw values to lux
print(lux, full, ir)
cnt = cnt + 1
[/sourcecode]



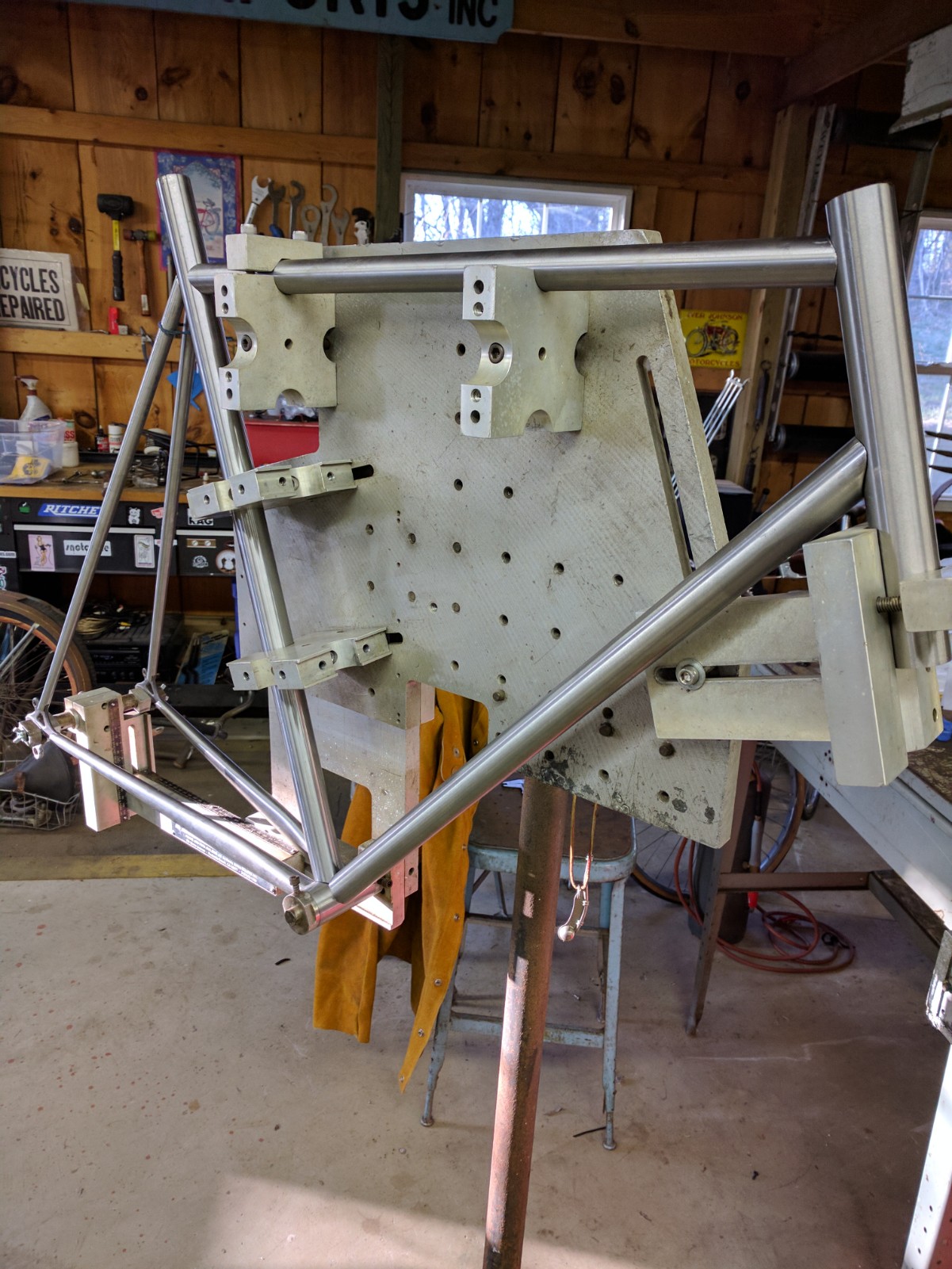

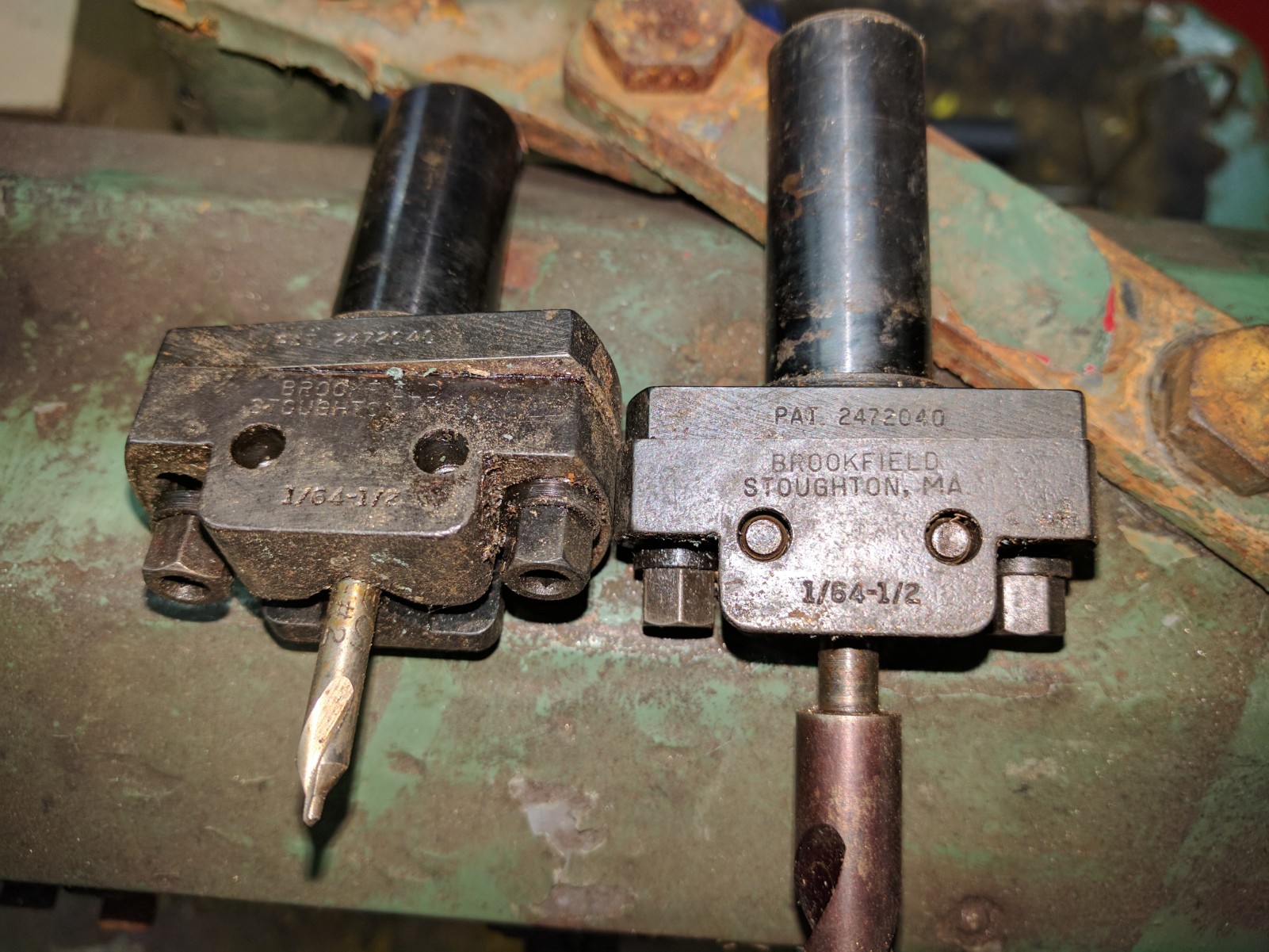
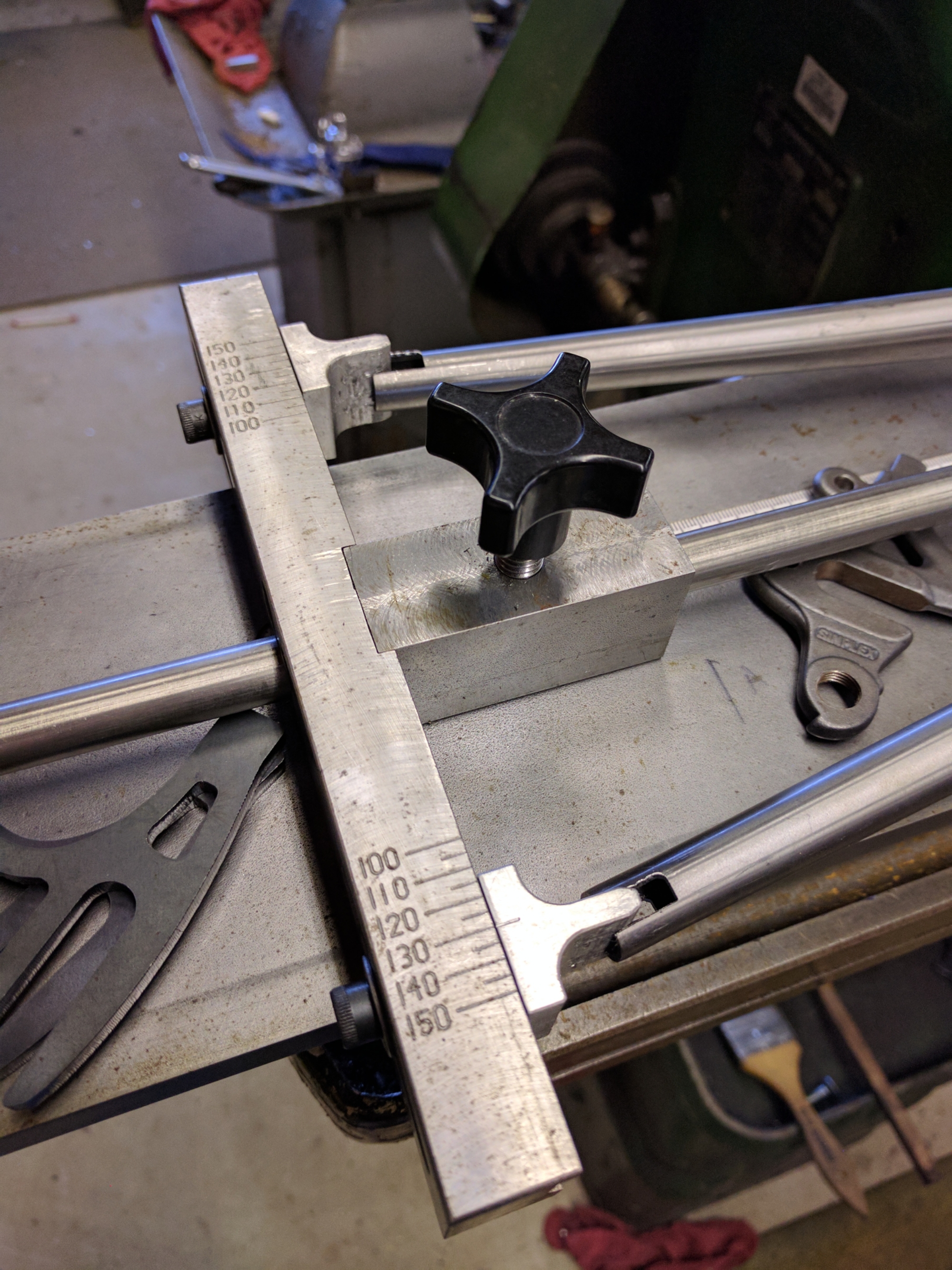
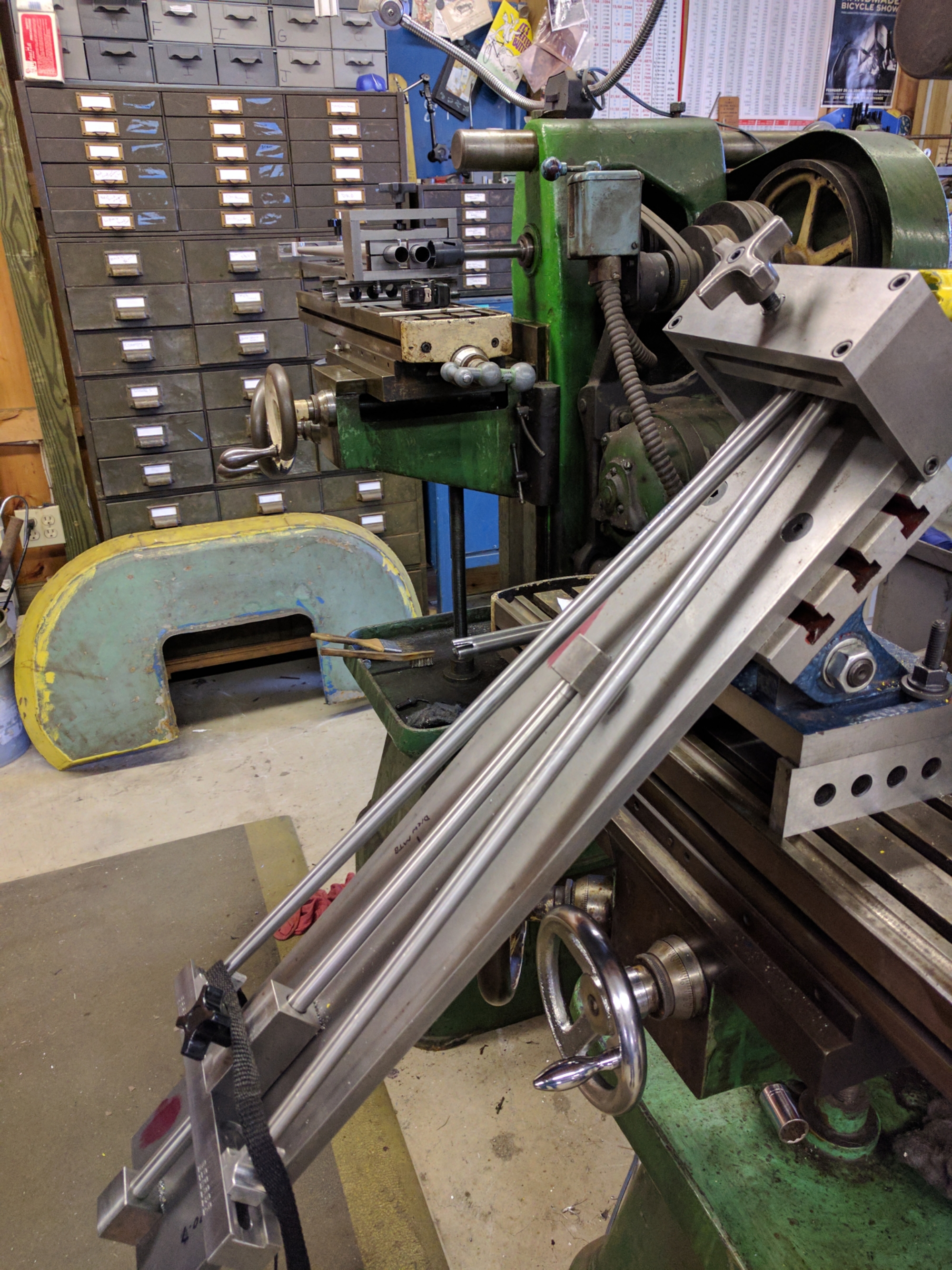
Still have some tweaking to do but blown away by how well the fixtures worked. Got a little tube clean up and prep to do before fillet brazing. Henry James Jig needs some dialing in as well.
read more